Pointcloud


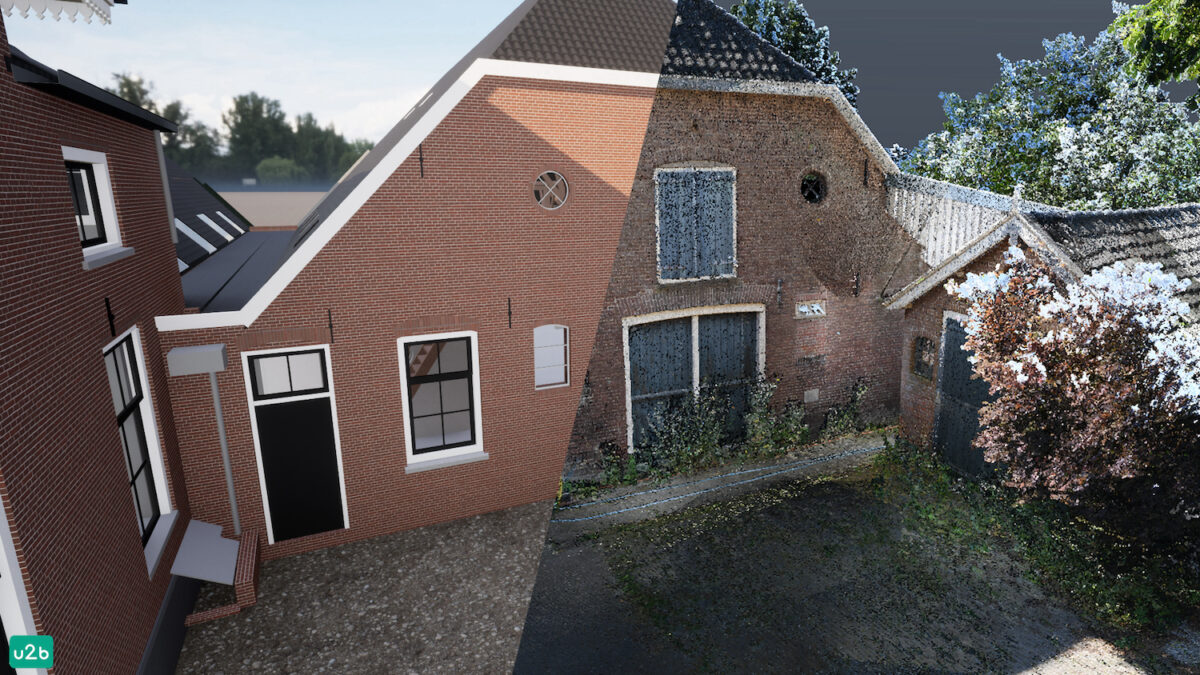






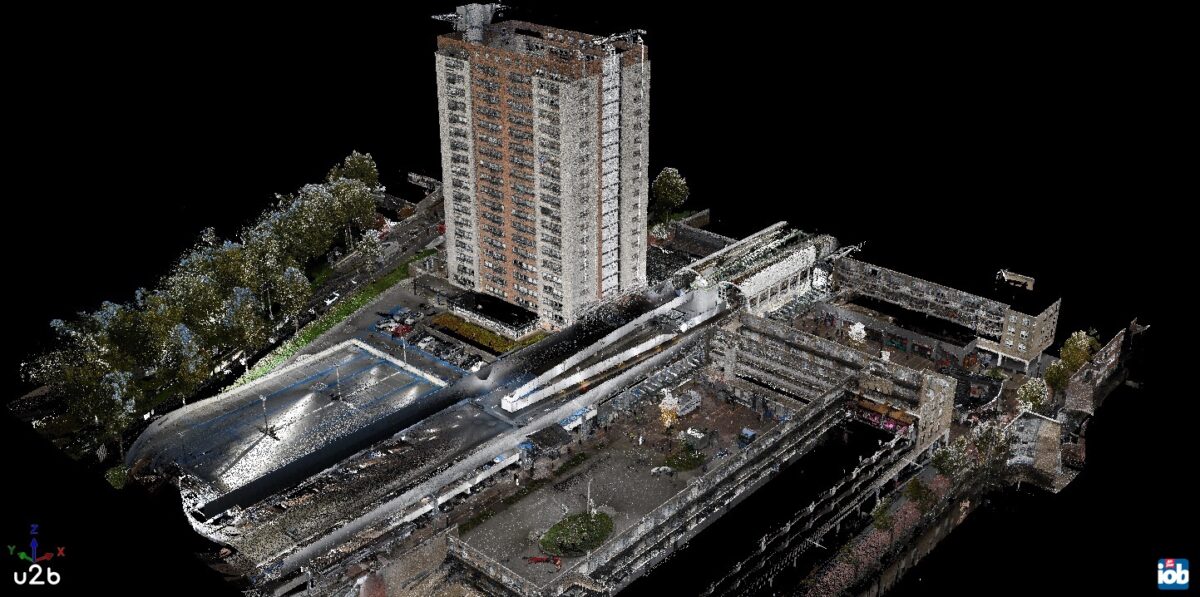



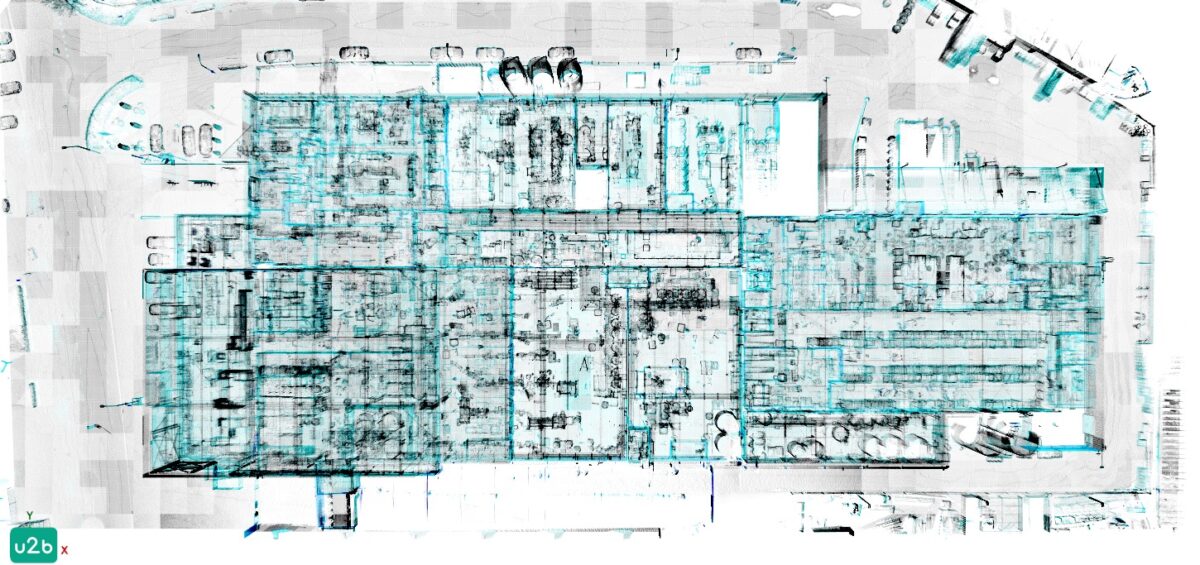

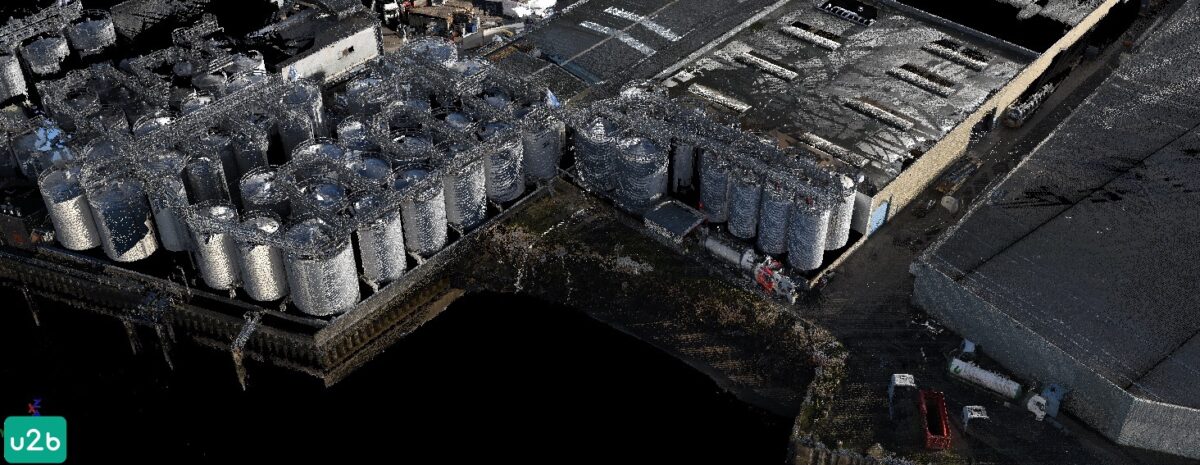






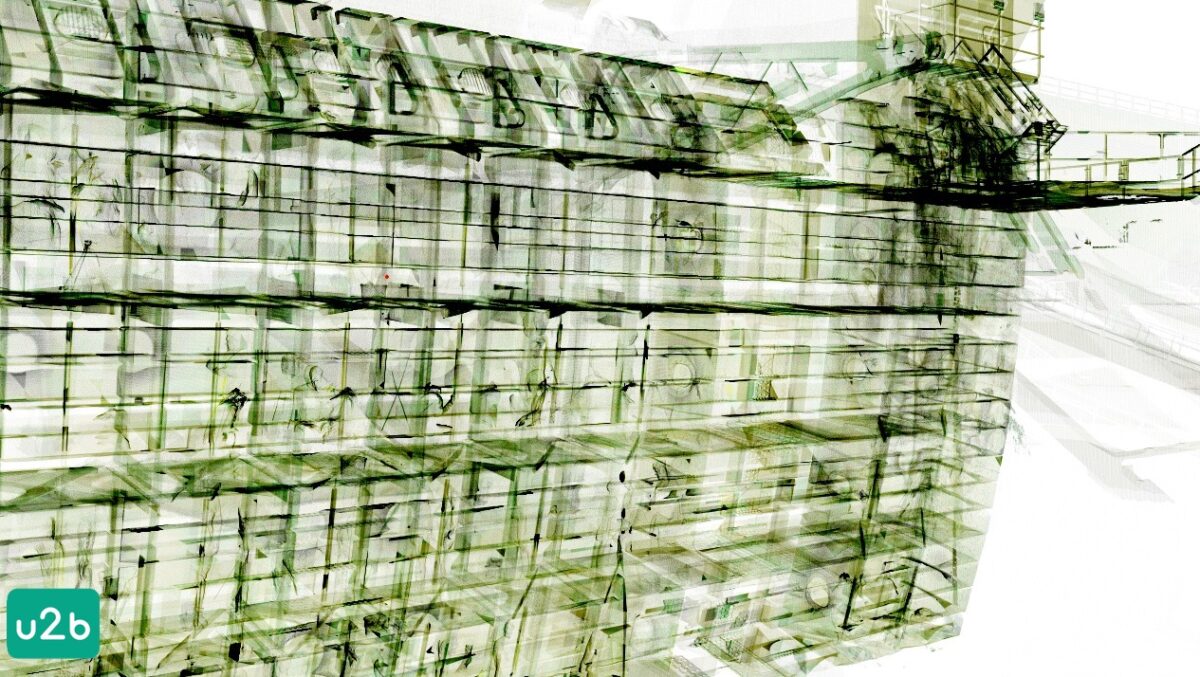


Het eindproduct van 3D laserscanning is een pointcloud, oftewel een puntenwolk.
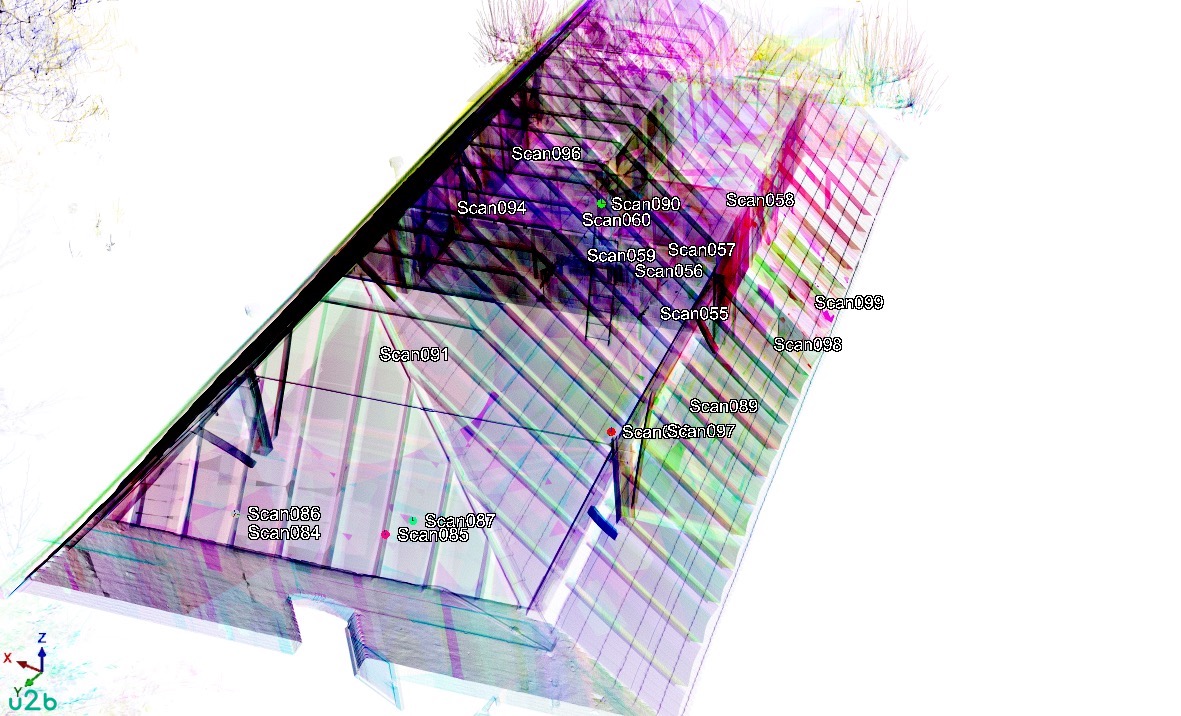
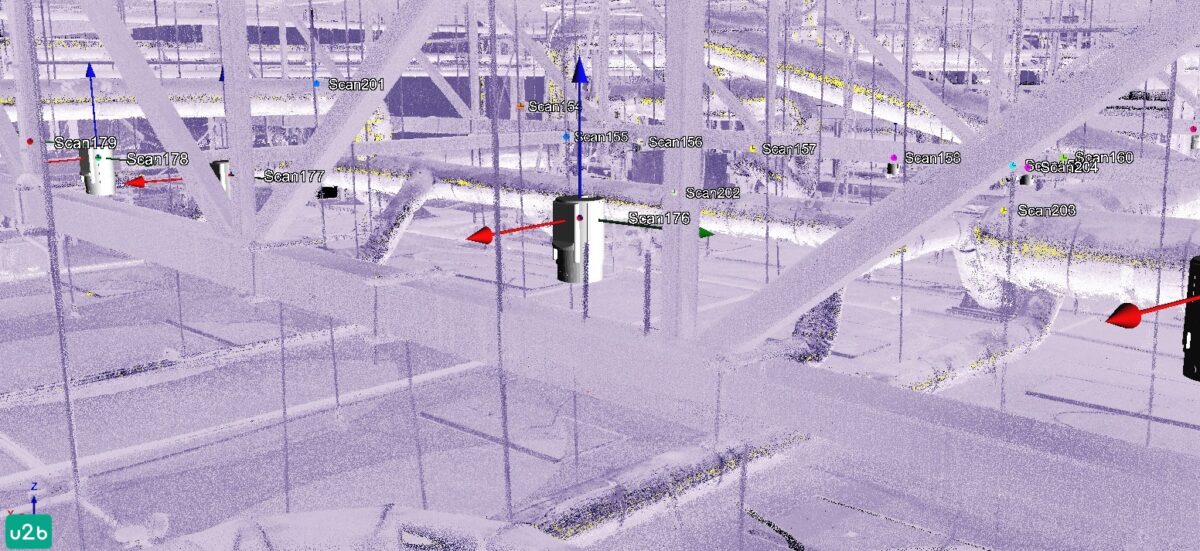
Deze komt als volgt tot stand: Een 3D laserscanner verricht metingen en maakt hierbij meerdere scans vanuit verschillende hoeken. Tijdens elke scan worden miljoenen punten per seconde gescand.
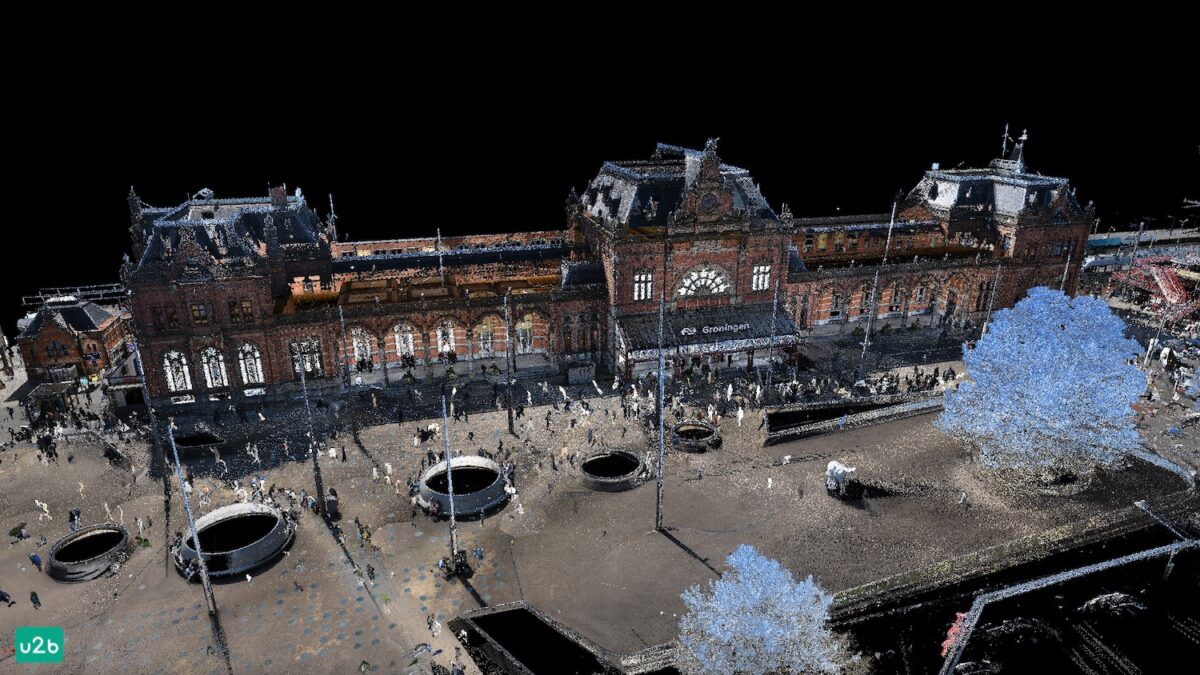
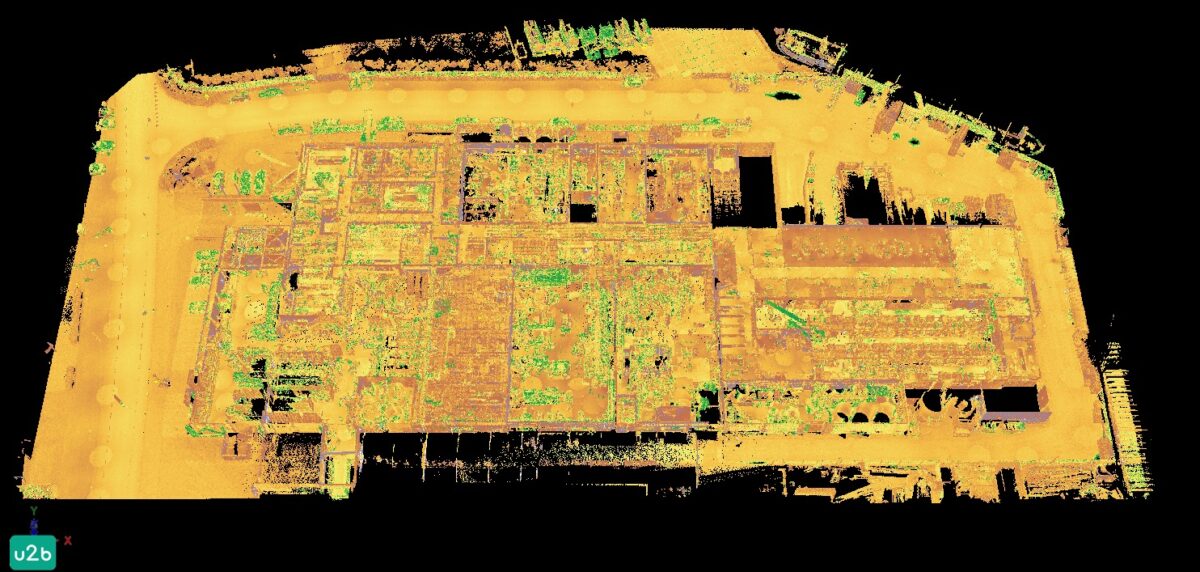
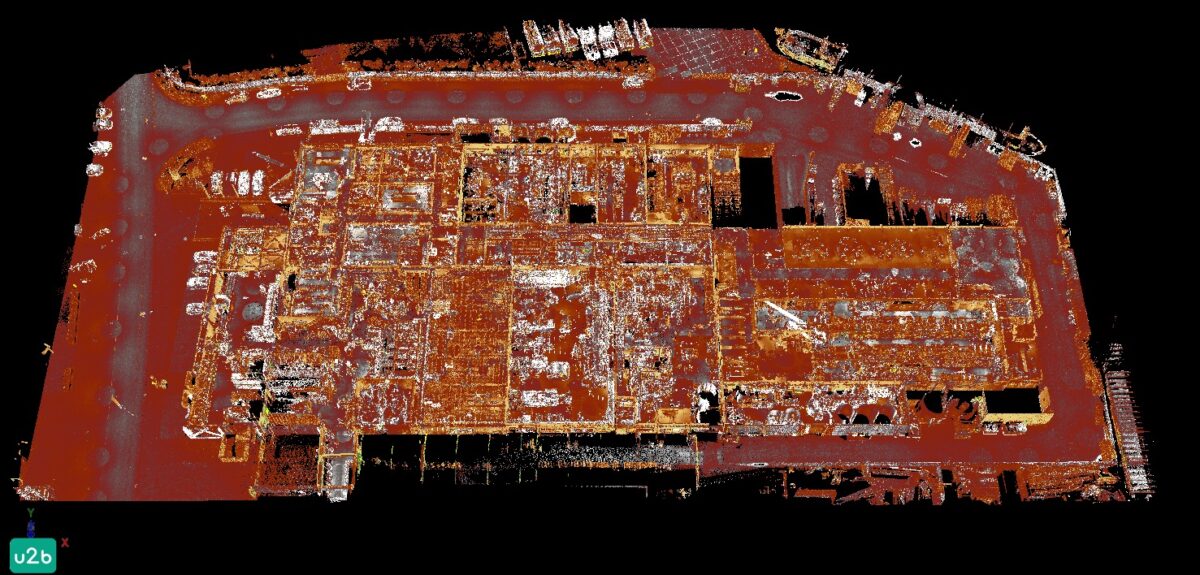
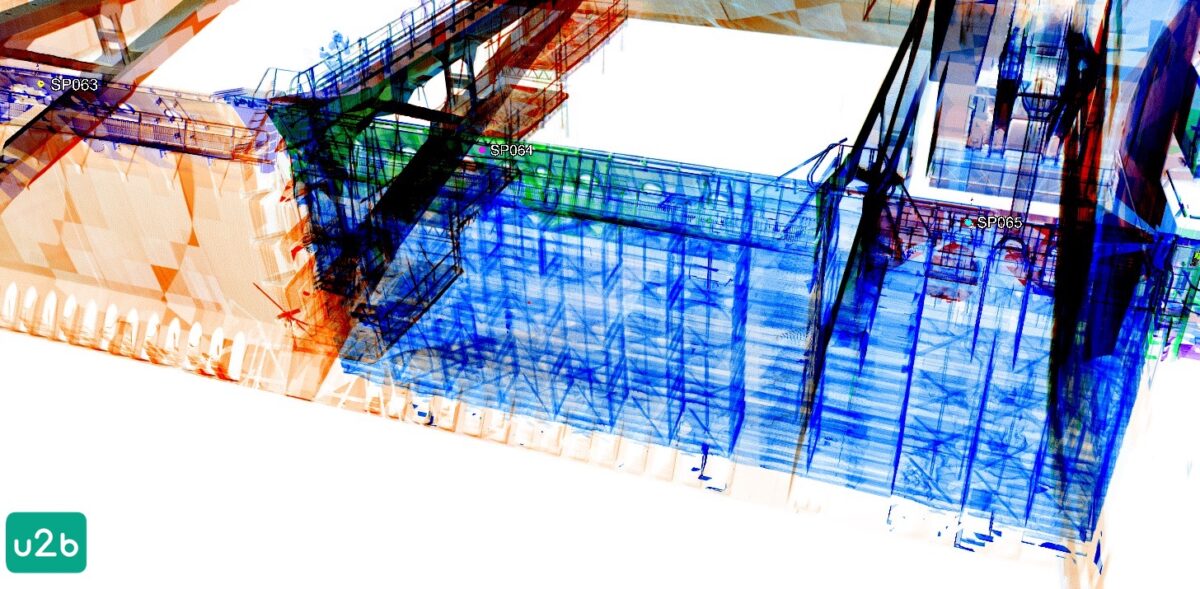
Wij verbinden de verschillende scans vervolgens met elkaar tot één wolk van punten: de pointcloud. Zo’n puntenwolk geeft het gescande object uiterst nauwkeurig weer. Hoe meer scans we uitvoeren, hoe groter het aantal punten en hoe gedetailleerder de pointcloud. Het samenvoegen van de afzonderlijke scans tot 1 samenhangende en gecontroleerde puntenwolk is een intensieve klus door de omvang van de data en de kennis en expertise die nodig is om dit op een kwalitatief hoogwaardige manier uit te voeren.
De pointclouds die wij leveren zijn opgeschoond van reflectie en goed hanteerbaar in Revit of Autocad doordat wij de puntenwolk dusdanig exporteren dat deze relatief klein is en geen bubble view bevat. Wij leveren de 360 graden in een apart bestand of online zodat u altijd een bruikbare opgeschoonde puntenwolk tot uw beschikking heeft.
Alle informatie 24/7 digitaal beschikbaar
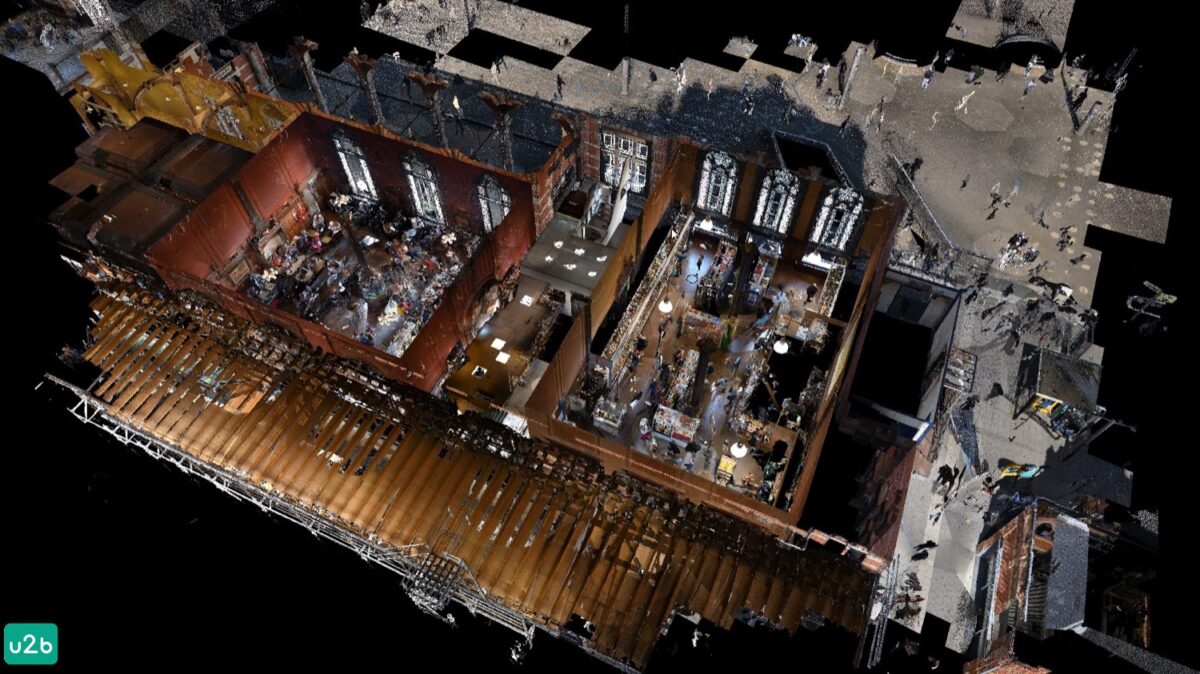
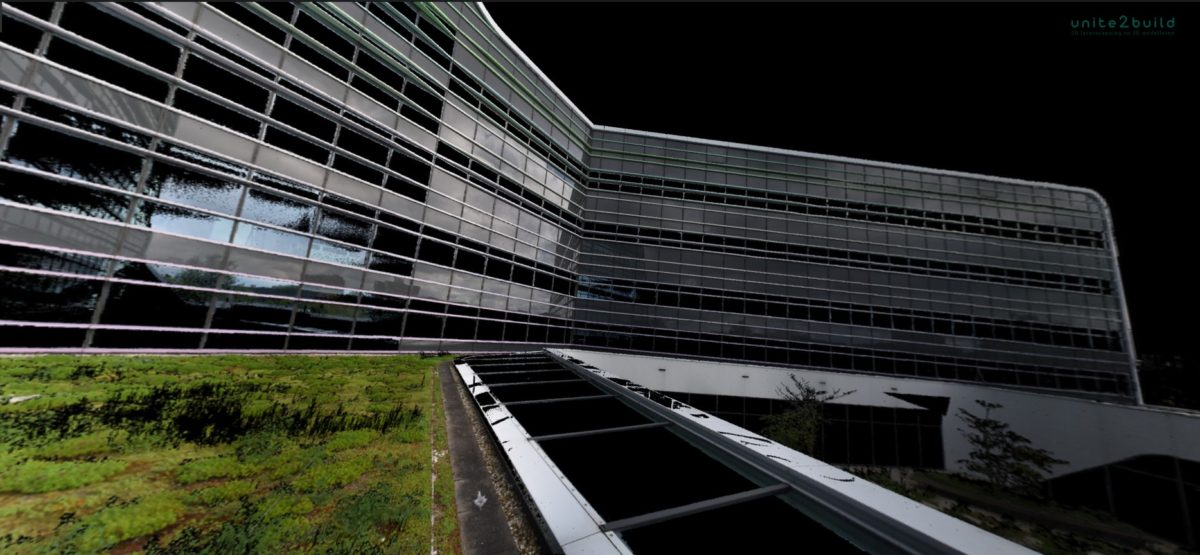
Met een pointcloud zorgen wij ervoor dat u alle informatie altijd digitaal beschikbaar heeft. Zeker in combinatie met 360 graden foto’s hoeft u niet terug naar de locatie om aanvullende gegevens te meten. Bovendien zijn de metingen zeer nauwkeurig en vindt u elke afwijking (bijvoorbeeld een scheve wand of een net iets andere maatvoering dan op de tekening staat) duidelijk terug.
De puntenwolk zorgt ervoor dat een gebouw geen geheimen meer voor u heeft. U komt in het vervolgtraject niet voor verrassingen te staan die de bouw vertragen en duurder maken.
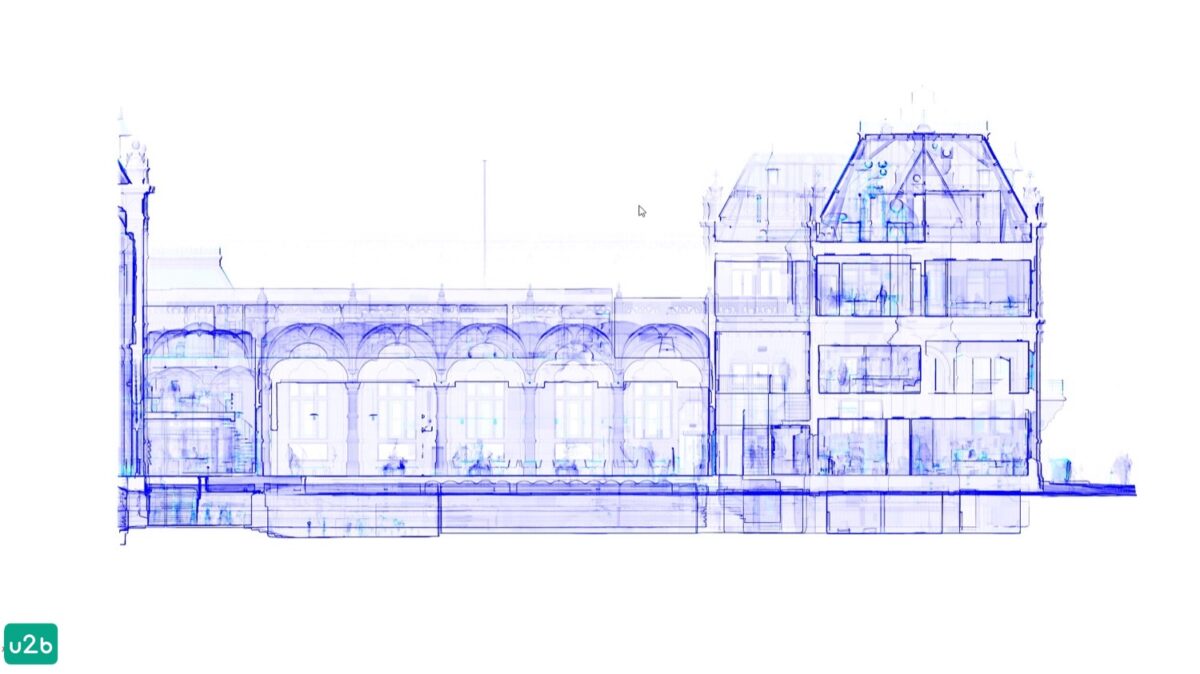
Pointcloud : Meestal geleverd met 3D BIM model
Meestal leveren we opdrachtgevers niet alleen de pointcloud, maar ook het uitgewerkte 3D BIM model, de 2D tekening en de 360 graden foto’s. Soms willen architecten zelf een BIM model maken. Ook dat kan, dan leveren wij alleen de puntenwolk.